Обзор контроллера SIMATIC S7-1500D с CU SINAMICS S120

Основные преимущества:
Ультракомпактный дизайн
- S7-1500 TF-CPU и регулятор привода SINAMICS S120 в одном устройстве
- Не требуется дополнительного места для PLC
Производительность
- Мощный TF-CPU со встроенным регулятором привода SINAMICS S120
- Наличие всех необходимых компонентов: памяти, интерфейсов и технологических входов-выходов
Простое масштабирование
- Одинаковые интерфейсы у всех классов исполнения (CPU 1504D TF / CPU 1507D TF)
- Возможность подключения дополнительных приводных систем (например, SINAMICS S120, S210) через PROFINET
Выбор для производственных машин
- Мощность для технически-сложных задач
- F-CPU и интегрированные в привод функции обеспечения безопасности для защиты персонала и оборудования
- Наличие всех необходимых интерфейсов, технологических входов/выходов и запоминающих устройств
- Высокоскоростные выходы с минимальной задержкой и высочайшей точностью коммутации, например, для кулачков

Дополнительные функции управления перемещением с TIA Portal V16 FW V2.8 CPU 1504D TF и CPU 1507D TF по сравнению с CPU 1500.

SIMATIC S7-1500D выполнен в виде модуля управления книжного формата SINAMICS S120
Расширенные функции управления перемещением
- Кинематические функции
- Управление кинематическими системами максимально с 4 интерполируемыми осями
- Синхронный редуктор и кулачковый синхронный ход
- С задачей синхронной позиции ведущей и ведомой оси
- Соединение по заданному значению
- Соединение по фактическому значению с экстраполяцией
- Синхронизация движения между PLC
- Синхронизация осей на различных CPU
- SIMATIC Safe Kinematics V1.0
Опциональная платная системная библиотека для безопасного мониторинга движений в декартовом пространстве
Встроенные программы для редактирования и просмотра
- Редактор кулачков
- Конфигуратор для кинематики
- Трассировка кинематики
- Координация трассировок по нескольким CPU
Веб-сервер
- Диагностические страницы для управления перемещением
Добавление технологических CPU в линейку изделий

1 Доп. 50 МБ для прилож. C/C++ в PLC-RT+500 МБ для C/C++ (RT/прилож.)
2 При цикле Servo/IPO 4 мс и загрузке CPU через управление перемещением на 35 %
3 Другие TO не используются
4 Необходимые ресурсы для ТО Motion Control: Регулируемая по скорости ось = 40 | Поз. ось = 80 | Синхр. ось = 160 | Кулачок = 20 | Кулачковая траектория = 160 | Измерит. щуп = 40
5 Необходимые ресурсы для ТО Extended Motion Control: Дисковые кулачки = 2 | Кинематический объект = 30 | Замещение ведущей оси = 3
Оптимизированное для производственных машин привлекательное решение

Аппаратная компоновка

Топология

Решение SIMATIC на базе привода состоит из следующих компонентов:
- SIMATIC Drive Controller (со встроенным регулятором привода SINAMICS S120 на базе CU320 (Часть функций (без EPOS/DCC/…), без CX32-2 как у SIMOTION D4x5-2)
- Компоненты SINAMICS S120 (устройство питания, силовые части и т. д.)
- DRIVE-CLiQ коммуникация, терминальные модули, модули датчиков, ...
В случае более 6 сервоприводов можно использовать другую компоновку, например, SINAMICS S120 CU320-2, SINAMICS S210, … 2)
Технологические входы-выходы


Проектирование
Добавление устройства в окне портала / дереве проекта
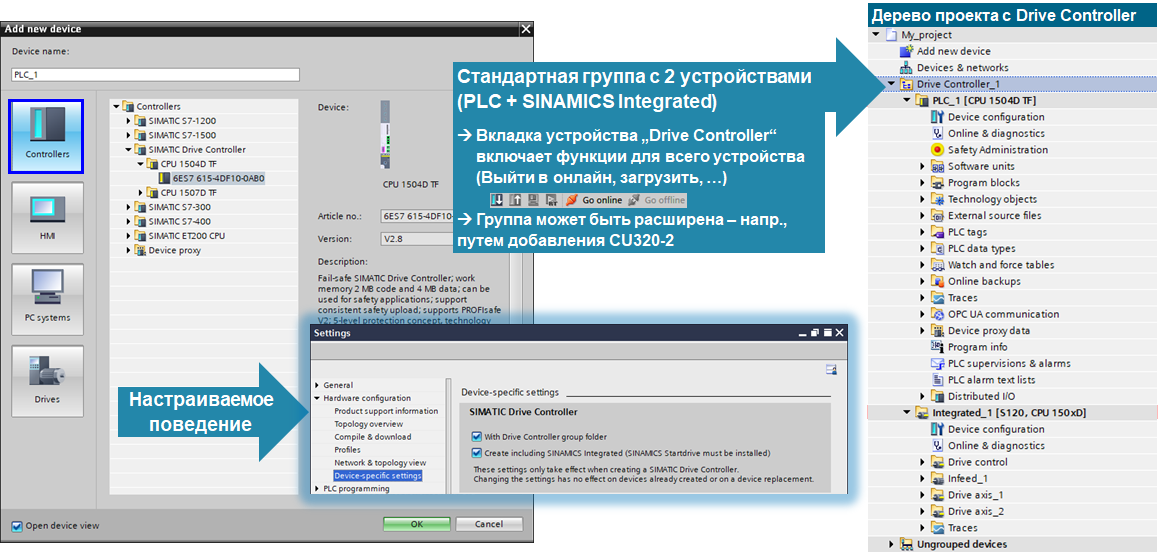
Вкладка сети и устройства

Предустановки упрощают проектирование
- SINAMICS Integrated всегда в изохронном режиме a настройки не требуются
- Телеграммы привода предустанавливаются -> CU: 393 / питание: 370 / привод: 105
- При соединении осевых TO с приводом в качестве образа процесса автоматически устанавливается „PIP OB Servo“
- Автоматическая синхронизация времени между CPU и SINAMICS Integrated / CU3x0-2 по телеграмма 39x

Каталог модулей / Замена устройства

Преимущества двух ПО
- Настройки на стороне привода выполняются через Startdrive и в равной мере доступны для SINAMICS Integrated и процессоров
- PLC и SINAMICS Integrated могут обрабатываться как отдельные объекты (Copy/Paste/Delete)
- Больше гибкости в навигаторе по проекту: свободное перемещение и формирование групп с PLC и SINAMICS Integrated
- Идентичная обработка „Integrated <-> CU320-2“
- Замена устройства между модульным S7-1500 CPU и SIMATIC Drive Controller (и наоборот) возможна (замена устройства между SINAMICS Integrated и CU320-2 сейчас не поддерживается)
Лицензирование SINAMICS Integrated

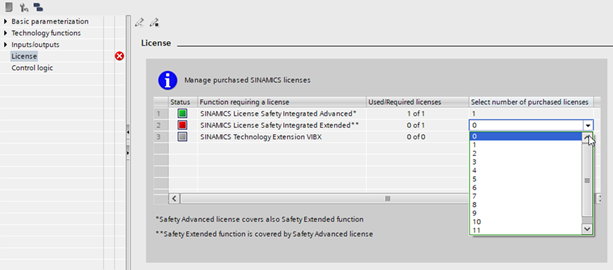
Процесс лицензирования для SINAMICS Integrated аналогичен процессу для соглашений об использовании для SIMATIC.
- Выбор функций
- Отображаются необходимые лицензии
- Необходимые лицензии (CoL) приобретаются
- Подтверждение числа приобретенных лицензий в области проектирования
Заказные номера соответствуют таковым у простых лицензий для CU320-2, например, Safety Integrated Extended Functions Заказной номер: 6SL3074-0AA10-0AA0
Технологические входы-выходы

Сравнение с SIMOTION D

Что такое технологические объекты (ТО)?

Технологические объекты для управления перемещением
- TO это программные объекты в контроллере
- TO представляют механические компоненты
- TO инкапсулируют технологические функции
- TO имеют единое конфигурирование и параметрирование
- TO обеспечивают унифицированный и простой подход к
управлению перемещением
Как TO интегрирован в систему?
- TO для регулируемой по скорости, позиционирующей и синхронной оси, дискового кулачка, кулачков, кулачковой траектории, измерительного щупа или внешних датчиков
- Блок данных TO содержит все данные конфигурации, заданные/фактические значения и информацию о
состоянии TO - TO обменивается информацией с приводом и
периферийными устройствами. Адаптация параметров привода выполняется автоматически - TO управляет приводом или приводной группой
- TO программируются через программу пользователя с помощью команд PLCopen
- Позиционные значения с высоким разрешением (6 знаков после запятой) -> макс. точность при вычислениях в приложении
Функциональность
Типы осей
Синхронная ось (синхронный редуктор и кулачковый синхронный ход)

- TO "Синхронная ось"
- Ведущее значение это
- заданное положение ведущей оси или
- заданное/фактическое положение ведущей оси (только T-CPU) или
- фактическое положение внешнего энкодера (только T-CPU)
- Возможность переключения ведущего значения
- Синхронизация на переменное или стационарное ведущее значение
- Синхронизация без установки синхронной позиции
- Синхронизация с установкой синхронной позиции (только T-CPU)
- Синхронизация согласно установкам по команде
- Возможность изменения передаточного числа по команде
TO рассчитывает и регулирует положение для синхронной оси в зависимости от ведущего значения
Привод регулирует скорость -> Датчик положения нужен

Без указания синхронной позиции "Относительный" синхронный ход
- Синхронизация через MC_GearIn
- При поступлении команды сразу же выполняется синхронизация ведомой оси с заданной динамикой -> Движение с синхронной скоростью и ускорением
- Синхронные позиции получаются при синхронизации и не могут быть определены заранее
С указанием синхронной позиции Абсолютный синхронный ход (только S7-1500 T-CPU)
- Синхронизация через MC_GearInPos
- Предварительная синхронизация с помощью заданной дистанции ведущего значения или параметра динамики
- Следящая синхронизация с помощью заданной дистанции ведущего значения
- При поступлении команды TO самостоятельно определяет начало синхронизации, чтобы выдержать заданные критерии.
Синхронная ось – Синхронизация



Сравнение функций синхронного хода между S7-1500 и S7-1500 T-CPU


Функции синхронного хода на примере формовочно-упаковочной машины


Синхронный ход с соединением по фактическому значению - Экстраполяция фактического значения
- Экстраполяция фактического значения при соединении по фактическому значению
- Фактическое значение как ведущее значение, напр., для внешнего энкодера или подключения на прекращающую вращение ось при ошибке
- Экстраполяция со стороны ведущего значения для компенсации задержки при обработке фактического значения
- „Следящее“ ведущее значение рассчитывается на основе уже известных значений
- Время экстраполяции имеет обусловленный ведущей и ведомой осью компонент (определяется системой)
- "Демпфирование" значений для экстраполяции через фильтры и поле допуска

Кулачковый синхронный ход
Точный позиционный кулачковый синхронный ход
- TO "Синхронная ось" и TO "Дисковый кулачок"
- Ведущее значение это заданное/фактическое положение ведущей оси или фактическое положение внешнего энкодера
- Возможность переключения ведущего значения
- Синхронизация на ведущее значение
- Синхронизация в соответствии с заданными командами
- Переключение дисковых кулачков на лету


Позиционируемая ось (позиционирование)
Программа пользователя:
- заданная позиция
- реферирование
- наложенное движение
TO формирует рампу разгона и торможения
TO управляет положением
Привод регулирует скорость -> Датчик положения нужен
Регулируемая по скорости ось (перемещение с управлением по скорости)
Программа пользователя:
- заданная скорость
TO формирует рампу разгона и торможения
Привод регулирует скорость -> Датчик положения не нужен
Контур управления - Управление по положению в контроллере

- Управление по положению в контроллере с тактом сервосистемы (MC-Servo)
- Регулирование скорости и тока в приводе
- Предуправление по скорости минимизирует зависящие от скорости ошибки рассогласования в управления по положению
- Симметрирующий фильтр замедляет заданное значение положения относительно предуправления по скорости
Контур управления - Управление по положению в приводе (DSC)

- Управление по положению в приводе с активированным DSC
- Регулятор положения с тактом контура управления по скорости (напр., с 125 мкс)
- Возможен значительно более высокий коэффициент усиления регулятора положения Kv и тем самым увеличенная динамика при задающем воздействии и устранении возмущающих воздействий для высокоскоростное приводов
- Возможность более длинных тактов для управления перемещением в контроллере
Кинематические функции
До 4 интерполируемых осей в кинематических системах

- TO "Kinematics"
- Готовые кинематические системы (Декартов портал, roller picker, Дельта-робот, SCARA, Шарнирная рука , Станок-трипод, Цилиндрический робот), а также определенные пользователем трансформации для интеграции собственных кинематических систем
- Линейное и круговое движение с управлением ориентацией (напр., вращение захвата) и скруглением
- Синхронное движение точка-точка
- Слежение за конвейером (Conveyor-Tracking)
- Программирование с функциональными блоками (напр., MC_MoveLinearAbsolute)
- Объектные системы координат, системы координат инструмента, контроль зон
- Динамическая адаптация
Ограничение момента и наезд на жесткий упор
Ограничение момента
- Настраиваемое ограничение силы/момента
- Необходима телеграмма 10x
- Настройка эффективности на стороне двигателя или
нагрузки - Установка единиц в зависимости от типа двигателя
Наезд на жесткий упор
- Подвод с ограниченным моментом
- Обнаружение жесткого упора через ошибку рассогласования
- „Зажим“ с неизменным заданным значением
- Зажимное усилие/момент могут изменяться
- Контроль нарушения или смещения жесткого упора
Поддерживаемые телеграммы PROFIdrive

Синхронизация движения между PLC
Плоское и каскадное распределение ведущего значения


Пример с обзором межсоединений


Сетевые конфигурации


- Один проект для всей конфигурации
- Все CPU / устройства в одной PN подсети
- Поддержка разных Servo тактов
- Ведущие и ведомые оси могут быть распределены по разным PLC в произвольном порядке
Трассировка проекта
- Координация трассировок по нескольким устройствам, поддержка нескольких CPU, поддержка различных типов устройств
- Отображение на общей схеме
- Поддержка разных источников запуска
Технологический объект "Kinematics"
Готовые кинематические системы – Требуется только настройка!

- TO "Kinematics" может быть создан как новый технологический объект.
- Для Roller picker 3D с осью ориентации потребуется один TO "Kinematics" и четыре позиционируемые оси.
- В конфигурации выбирается соответствующий тип кинематики
- Позиционируемые оси согласуются с кинематикой
- Выполняется параметрирование геометрии кинематики.
Предварительная настройка динамики, зон, систем координат, инструментов





- Для динамической характеристики ориентации и траектории могут быть заданы значения по умолчанию и предельные параметры
- Допускается смещение и вращение кинематики в мировой системе координат
- Может быть настроено до трех объектных систем координат
- Может быть настроено до трех инструментов
- Трехмерная визуализация для процесса настройки зон
Ввод в эксплуатацию с помощью панели управления


- Удобно: Работа от кнопок и реферирование кинематики на одной панели управления
- Ручное перемещение осей кинематической системы с учетом системы координат и инструмента
- 3D визуализация движения в Трассировке кинематики
Программирование с функциональными блоками по PLCopen


Команды записываются в последовательность команд и выполняются. Последовательность команд может содержать до десяти команд. Число команд в последовательности команд отображается в TO "Kinematics" (TO-DB).
С помощью MC_GroupInterrupt, MC_GroupContinue, MC_GroupStop можно прервать, продолжить или отменить обработку последовательности команд.
Синхронное движение „точка-тока“ (sPTP движение)




Различные диагностические функции

Помощь при проектировании
Интегрированная в TIA Portal онлайн-диагностика TO "Kinematics"
- биты состояния и ошибок
- состояние движения
- состояние зон и инструмента
Трассировка кинематики – 3D визуализация и запись движений




Простая калибровка объектных систем координат